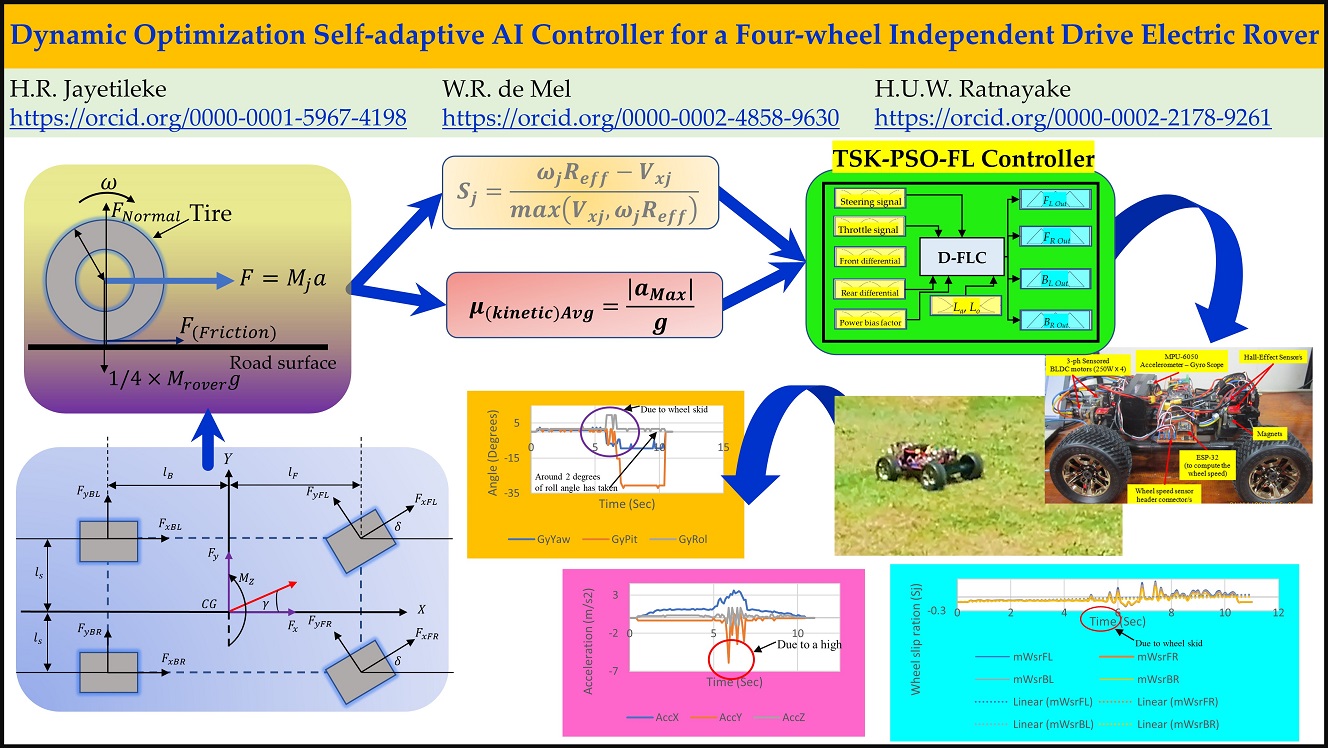
Dynamic Optimization Self-adaptive AI Controller for a Four-wheel Independent Drive Electric Rover
DOI:
https://doi.org/10.31357/ait.v1i1.4873Abstract
In this paper, a dynamic optimization self-adaptive controller for a four-wheel independent drive electric rover has been investigated to enhance the dynamic stability. The proposed self-adaptive AI controller is based on dynamic Fuzzy Logic (FL) control mechanism. The dynamic self-adaptive properties have been integrated into the proposed FL controller through a dynamically tuned Particle Swarm Optimization (PSO) mechanism. Nevertheless, the dynamic FL controller and the dynamic PSO mechanism has been synchronized together for every sampling instance k to obtain the optimum performance of the electric rover. In this electric rover, all the four wheels have a fixed orientation and each wheel powered by a 250-Watt Brushless Direct Current (BLDC) motor through separate gear ratio mechanisms to obtain the desired torque and angular velocity. Therefore, the steering mechanism was achieved in this rover through the proposed AI controller, which was based on the differential speed mechanism. However, this paper presents the control methodology and obtained test results related to straight road tests under different slippery road conditions. The rover test results show that on different slippery road conditions the proposed PSO based FL controller has maintained the wheel slip ratio of all the four wheels which was less than 0.35 approximately. Here, the translational speed has been limited to 40 km/hr approximately within its recorded top speed of 90 km/hr while maintaining the desired fix orientation.
Downloads
Published
How to Cite
License
Copyright (c) 2021 Hasitha Ruwan Jayetileke, W.R. de Mel, H.U.W. Ratnayake

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
The Authors hold the copyright of their manuscripts, and all articles are circulated under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, as long as that the original work is properly cited.
The use of general descriptive names, trade names, trademarks, and so forth in this publication, even if not specifically identified, does not imply that these names are not protected by the relevant laws and regulations. The authors are responsible for securing any permissions needed for the reuse of copyrighted materials included in the manuscript.