A Novel Machine Learning based Autonomous Farming Robot for Small-Scale Chili Plantations
DOI:
https://doi.org/10.31357/ait.v2i3.5461Abstract
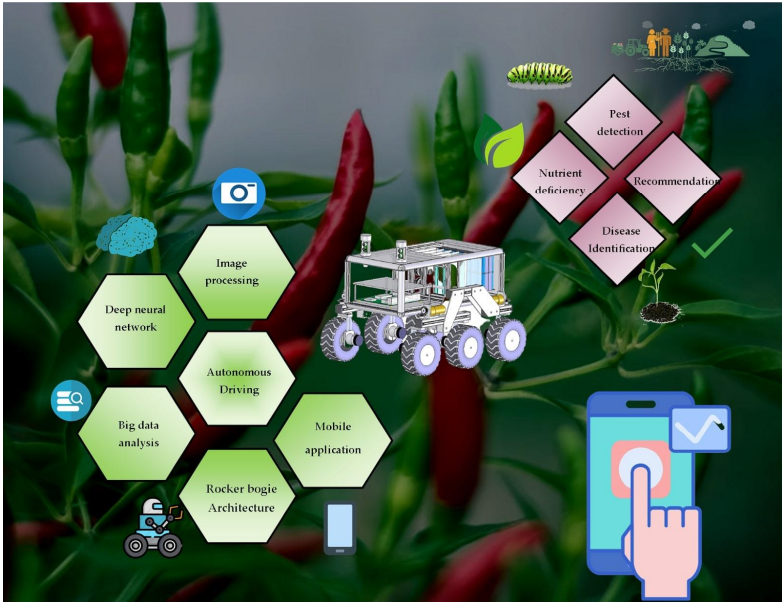
The agricultural sector is a major economic force in Sri Lanka, which contributes to the national economy, food security, and employment. The traditional methods practiced by farmers mainly drove the growth of the agriculture sector over the last 2500 years. However, these traditional methods have often been ineffective against pest attacks in recent years causing significant losses to farmers and threatening food security. To counter these issues, officials and researchers have started formulating novel technology-based smart solutions. This study proposes a smart, autonomous mobile robot that can help detect pests and diseases in advance and assist in crop estimation of chili plants. The model is created as such for pest and plant disease detection in small-scale chili plantations with the hope of using it in other crop types for the same purpose in the future. Thus, the proposed approach together with the developed model can be used to enhance the growth of other plants as well. Identification of the type of garden and the detection of pests and plant diseases are achieved using machine learning techniques while the identification of nutrient deficiencies is achieved using image processing techniques. This proposed mobile robot incorporates sensory inputs, machine learning, robotics, and image processing. Furthermore, a mobile application acts as the interface between the user and the robot.
Downloads
Published
How to Cite
License
Copyright (c) 2022 Kasun Thushara, Fazlun Rifaza Noordeen, Kaveesha N. Ranasinghe, Chamitha D. Alwis, Madushanka N. Dharmaweera, Bhathiya M. Pilanawithana

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
The Authors hold the copyright of their manuscripts, and all articles are circulated under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, as long as that the original work is properly cited.
The use of general descriptive names, trade names, trademarks, and so forth in this publication, even if not specifically identified, does not imply that these names are not protected by the relevant laws and regulations. The authors are responsible for securing any permissions needed for the reuse of copyrighted materials included in the manuscript.